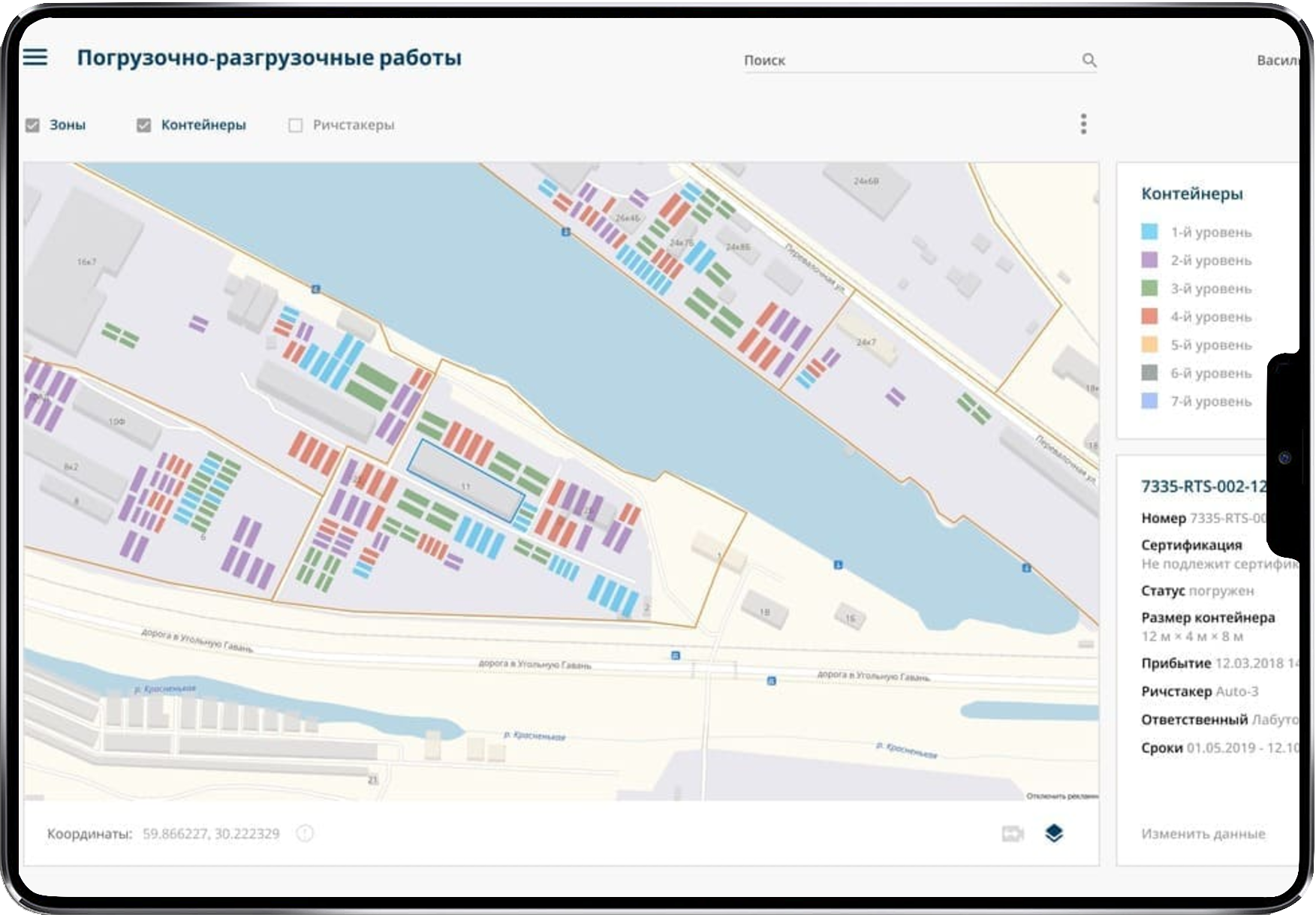
Актуальная карта размещения
Система должна показывать, где контейнер стоит сейчас, а не только где он был зарегистрирован при поступлении.
Система цифровой карты контейнеров и контроля перемещений ричстакеров
В контейнерном терминале важно не только знать план погрузки, но и видеть фактическое размещение контейнеров после реальных перестановок на площадке. Когда нужный контейнер находится в глубине штабеля, оператору приходится снимать верхние контейнеры и временно переставлять их в другие места.
Для проекта мы разработали систему цифровой карты размещения контейнеров в порту. Решение объединило бортовую электронику на ричстакерах, датчики захвата, камеры с нейросетевым распознаванием номера контейнера и связку с внутренней ERP-системой порта.
В результате диспетчер, логистика и операторы работают с одной актуальной картиной терминала: система знает, какой контейнер был взят, куда он переставлен, когда он погружён на платформу и когда должен считаться убывшим из порта, а не просто перемещённым внутри площадки.

Проект строился вокруг непрерывной прослеживаемости контейнеров и их перемещений прямо во время работы терминала.
Актуальная карта размещения
Система должна показывать, где контейнер стоит сейчас, а не только где он был зарегистрирован при поступлении.
Задания для ричстакеров
Оператору нужно видеть, какой контейнер требуется обработать и в какой зоне терминала он находится.
Идентификация по номеру
При захвате контейнера система должна определять его номер и связывать событие с конкретной единицей хранения.
Фиксация нового положения
После отпускания контейнера решение должно вычислять новое место установки и обновлять цифровую карту терминала.
История перемещений
Для каждого контейнера требуется сохранять цепочку операций, статусы и ответственных пользователей.
Интеграция с ERP порта
Все изменения должны передаваться во внутреннюю систему порта через согласованный интеграционный контур.
1 шаг из 6
Диспетчерский контур формирует задание на нужный контейнер, а оператор ричстакера получает его в интерфейсе вместе с зоной размещения.
2 шаг из 6
Если нужный контейнер находится в глубине штабеля, оператор начинает разбирать верхние уровни, а система сопровождает каждое промежуточное перемещение.
3 шаг из 6
Срабатывание датчика захвата запускает контур распознавания: камера читает номер контейнера, а система сверяет его с данными портовой ERP.
4 шаг из 6
Когда контейнер отпускается на новом месте, система фиксирует координаты установки и записывает обновлённое положение в цифровую карту.
5 шаг из 6
Если контейнер ставится на автомобиль или иную платформу для вывоза, оператор выбирает соответствующий сценарий, и система помечает его как убывший.
6 шаг из 6
Диспетчер и логистика сразу видят новое состояние карты, историю операций и уведомления по контейнерам, которых нет во внутренней системе.
В кабине ричстакера оператор работал с планшетным интерфейсом: получал задание, видел площадку и зоны размещения и мог быстрее добраться до нужного контейнера внутри штабеля.
Бортовой контур был собран на собственной электронике. Микрокомпьютер, датчики, захват и камера работали как единая цепочка событий: система определяла момент захвата и отпускания контейнера, связывала его с распознанным номером и передавала обновление в ERP.
Для отдельных сценариев были предусмотрены специальные статусы. Если контейнер ставился на платформу для вывоза, оператор отмечал это в интерфейсе, и система фиксировала убытие. Если номер контейнера не находился во внутренней системе порта, оператор сразу получал уведомление.
Бортовой АПК на технике
Ричстакеры были оборудованы собственной электроникой, которая связывает физические события на машине с цифровым контуром.
Распознавание номеров
Камера и нейросетевой модуль определяют номер контейнера и помогают системе понять, какой объект реально находится в захвате.
Интерфейс заданий
Оператор получает список задач и видит, какой контейнер нужно обработать и в каком месте терминала он находится.
Цифровая карта площадок
Система хранит зоны, уровни размещения и текущее положение контейнеров в единой пространственной модели терминала.
Статусы перемещения и выбытия
Контур различает обычную перестановку по площадке и фактическое убытие контейнера с территории порта.
Интеграция по OData
Данные о контейнерах и событиях обменивались с внутренней системой порта через согласованный протокол интеграции.
Решение помогло не только фиксировать контейнеры на карте, но и выстроить более прозрачную работу между техникой, диспетчером и внутренней системой порта.
Понятное текущее размещение
Диспетчер видит фактическую картину терминала после перестановок, а не работает по устаревшим данным о месте хранения.
История по каждому контейнеру
Любое перемещение оставляет цифровой след: кто взял контейнер, куда поставил и какой статус был зафиксирован.
Реакция на исключения
Если контейнер отсутствует во внутренней системе или возникает нестандартный сценарий, оператор получает уведомление сразу во время работы.
Единый контур для ролей
Оператор ричстакера, диспетчер и логистика работают с одной моделью контейнерного двора и не расходятся в данных.
Основа для дальнейшей оптимизации
Накопленная история перемещений даёт материал для анализа логистики и последующего улучшения порядка размещения контейнеров.
Подстройка под реальную технологию
Система была спроектирована под конкретные процессы терминала, а не как универсальный журнал операций без привязки к технике.
Здесь нужна была не изолированная карта контейнеров, а единый операционный контур, который работает прямо в процессе перестановок на терминале.