Разработка системы автоматизации морского порта
«Морской Рыбный Порт» - компания, зарекомендовавшая себя на рынке стивидорных услуг. На протяжении многих лет компания повышает качество оказываемых услуг, постоянно совершенствуя деятельность и развивая инфраструктуру. Современное техническое оснащение и квалифицированный персонал позволяют быстро и качественно выполнять операции любой сложности.
Цель проекта - сокращение времени погрузки судов за счет автоматизации логистики и разработки системы контроля размещения контейнеров в порту.
В проекте реализовано
Задачи
Описание проекта
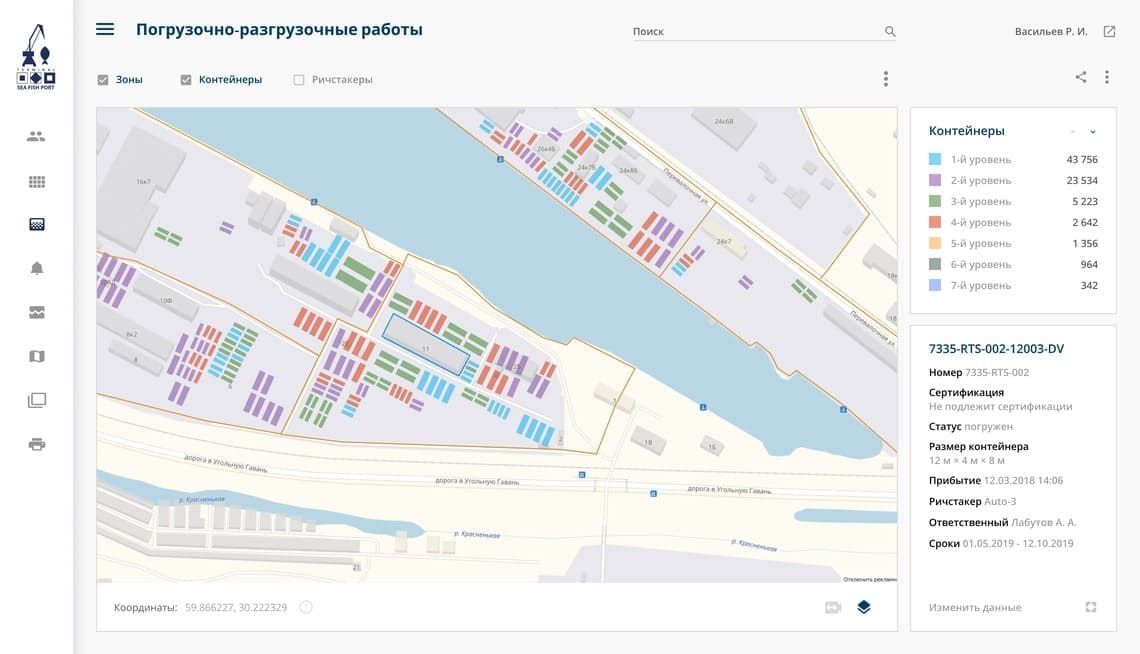
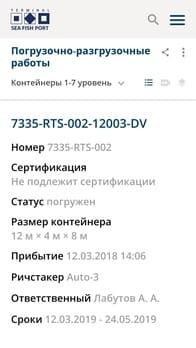
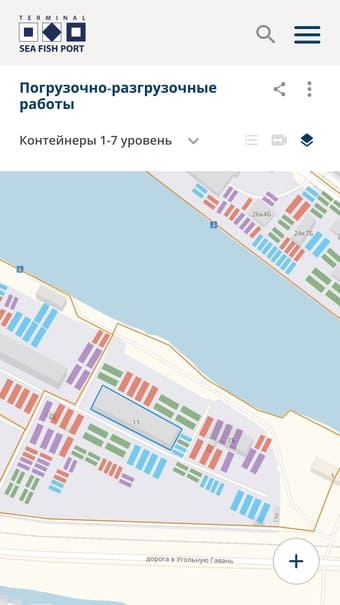
При попадании контейнера в порт через ЖД, авто или морской терминал контейнер устанавливается на место хранения ричстакерами. Ричстакеры оборудованы камерами и специальным АПК определения координат. Точность оборудования в полевых тестах составила отклонение в 15 миллиметров по каждой оси координат. При захвате контейнера ИС с помощью знания координат размещения (если контейнер ранее устанавливался на данное место с помощью ИС) и камеры (передающей информацию на систему визуального распознавания) определяет номер контейнера и перемещение контейнера, а также место его новой установки фиксируются в ИС. Интерфейс диспетчера позволяет видеть на карте все площадки и зоны размещения, а также контейнеры и историю работы с ними.
Специальный алгоритм определяет, какие контейнеры необходимо погрузить раньше (заход судна и план погрузки), а какие позже и предлагает оператору ричстакера размещать контейнеры ближе или дальше от зоны погрузки на судно, а также запрещает размещать один контейнер под другим, если нижний необходимо будет забрать раньше. Созданный алгоритм оптимизирует размещение контейнеров таким образом, чтобы обеспечить наибольшую скорость последующей погрузки на судно.
Составные части системы автоматизации
Информационная система разработана индивидуально под задачи клиента по стоимости, намного меньше имеющихся готовых решений на рынке.
Клиент получил комплексное решение, решающее поставленные бизнес-задачи.